Search¶


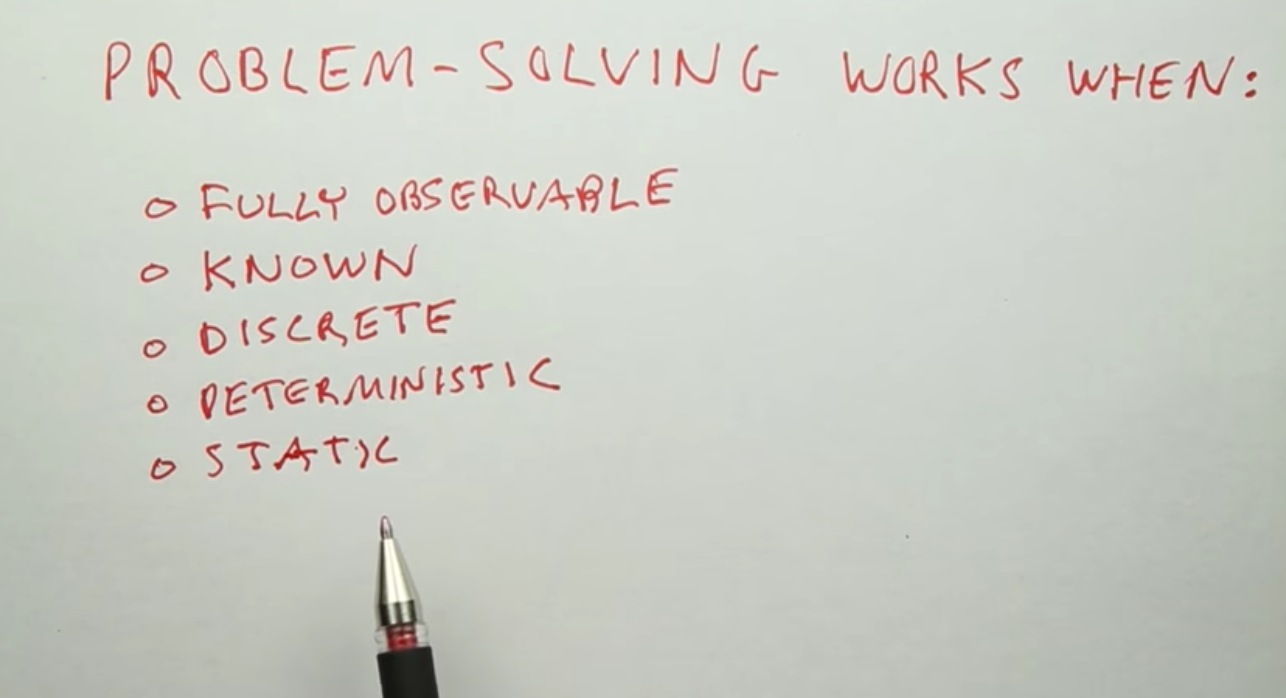
Problem Solving¶

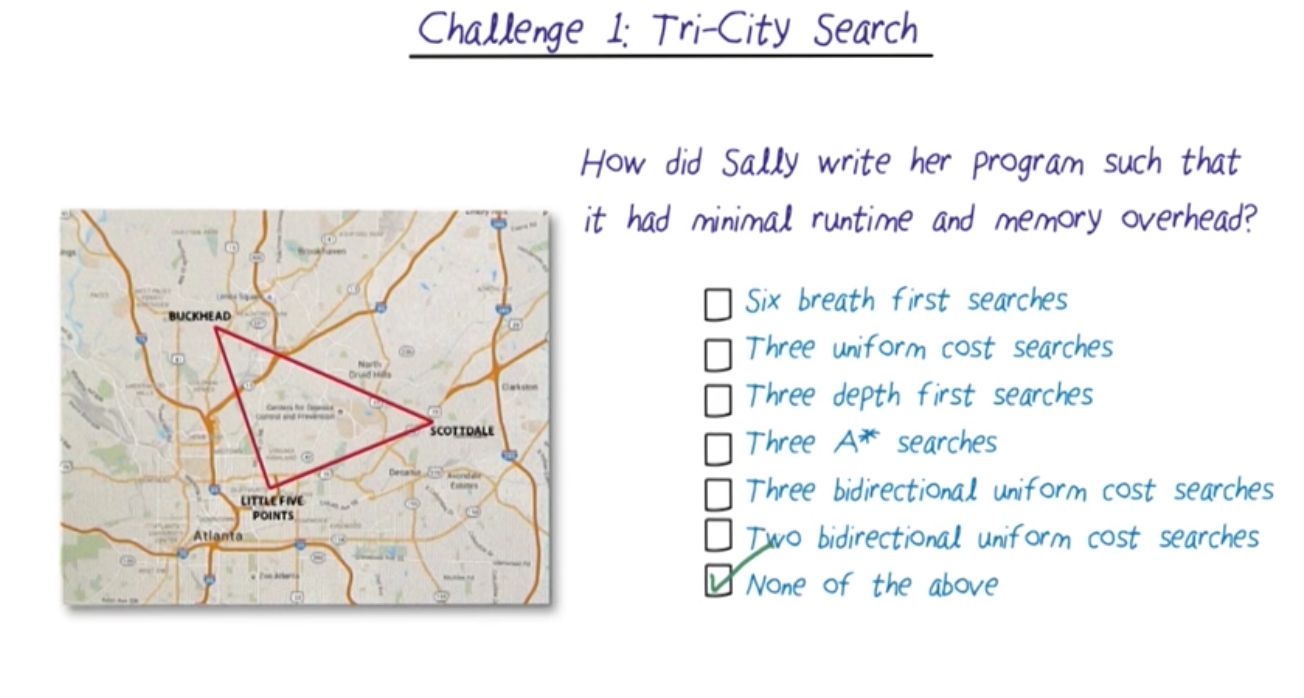
- Complexity from the many choices.
- Complexity comes from partial observability.
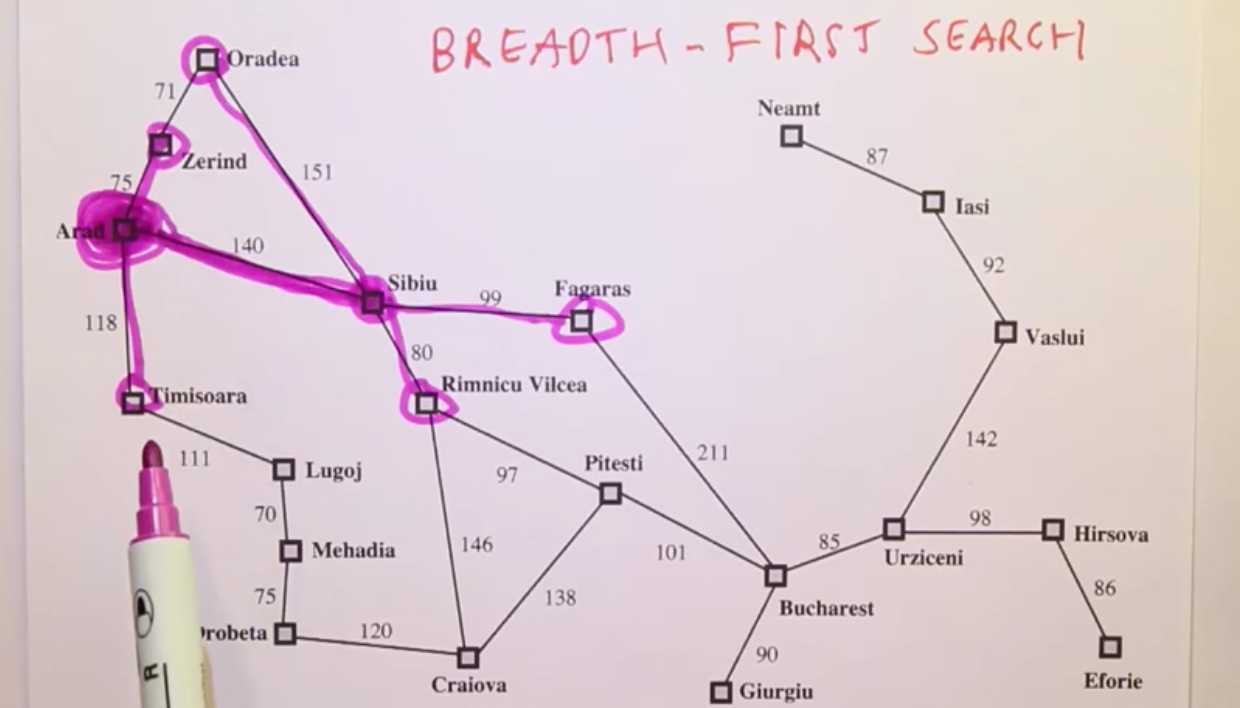
Question: Can we find the direction from Arad to Bucharest from this map?

What is a problem¶
Agent is given a problem of coming up with a sequence of actions to find a path from Arad to Bucharest.

Definition of the problem
- Initial State
- Actions(s) -> {a1, a2, a3 }
- Result(s, a) -> s’
- GoalTest(s) -> T|F
- Path Cost

Example Route Finding¶

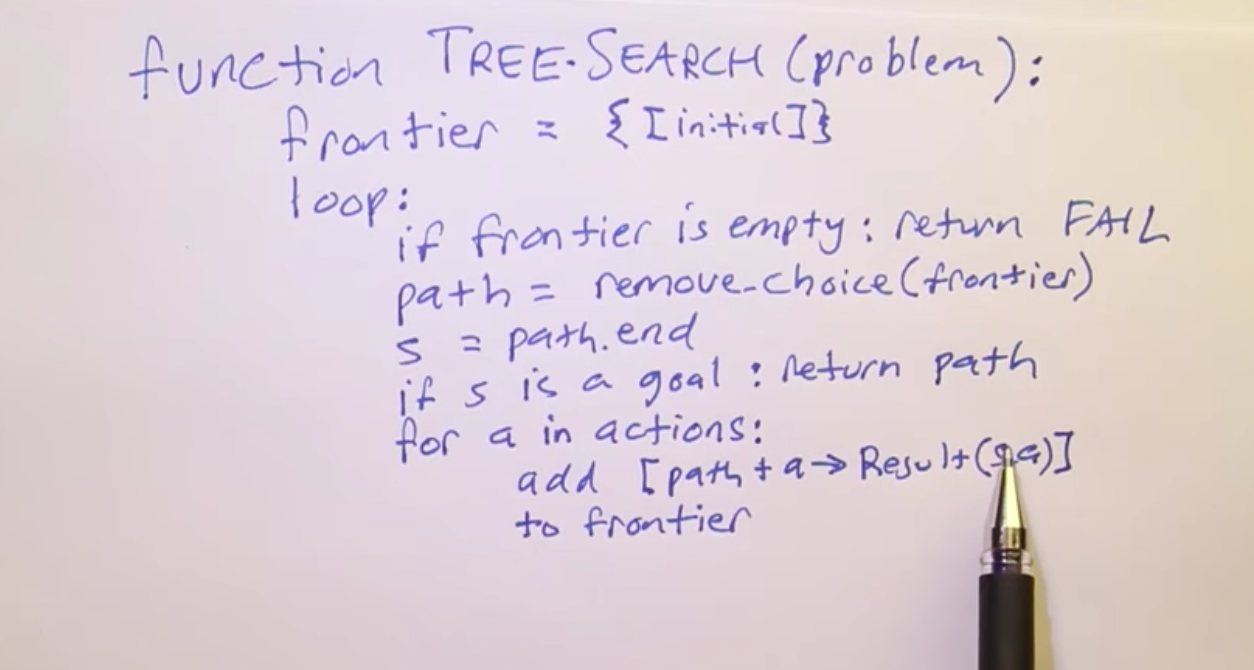

Tree Search Continued¶



In the preliminary algorithm, A is repeated since we are not keeping track of explored states. Ideally, we would not add duplicates from backtracking.
Graph Search¶

Breadth First Search-1¶
Breadth First Search 3¶






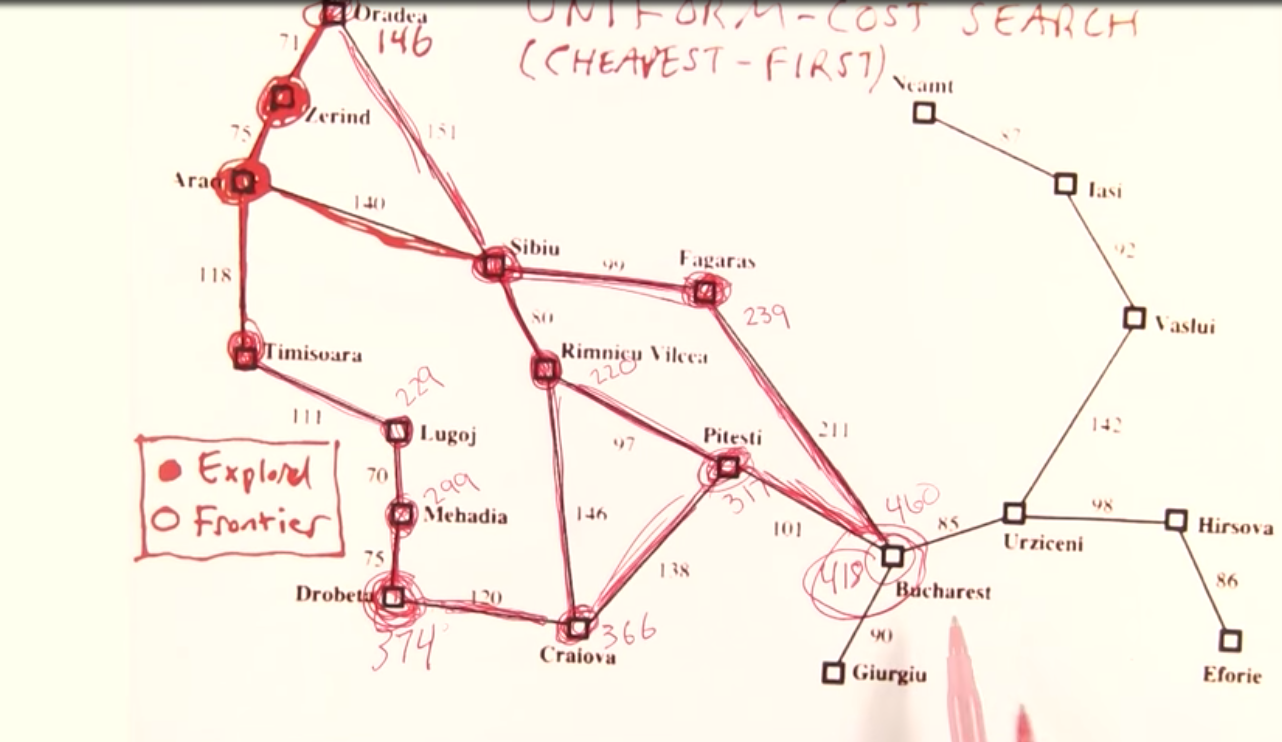


Search Comparison - 1¶






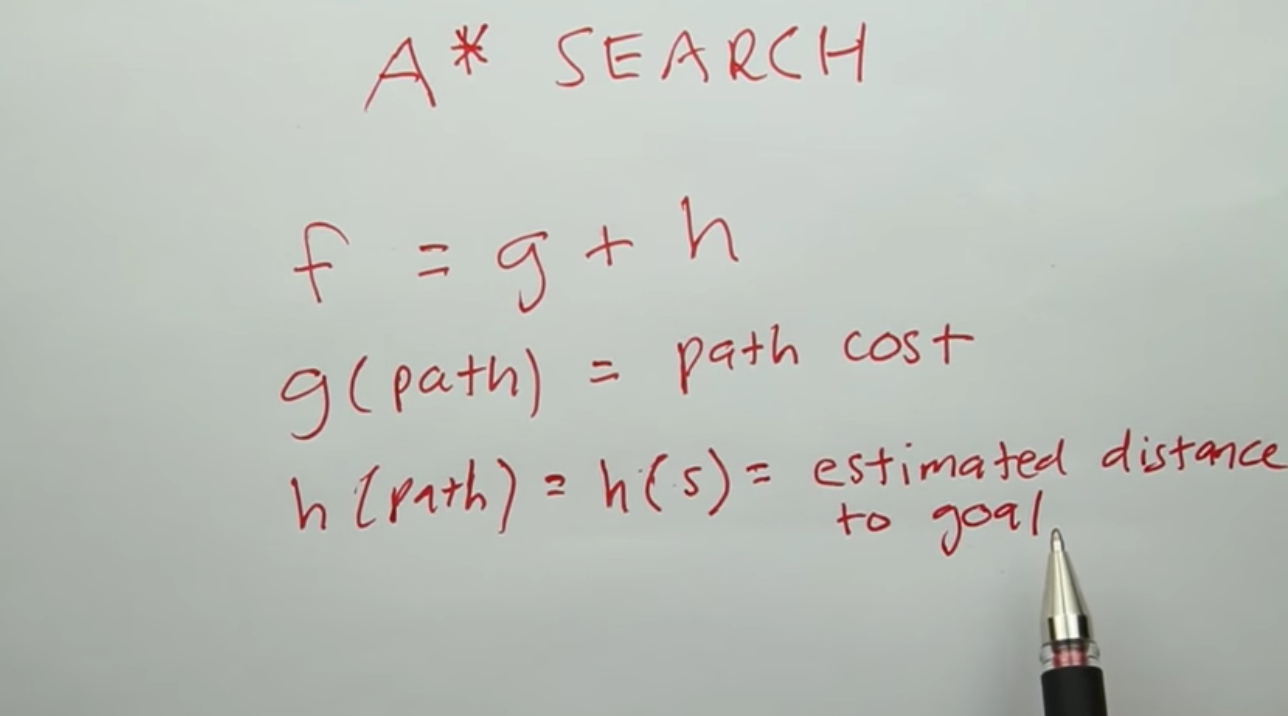




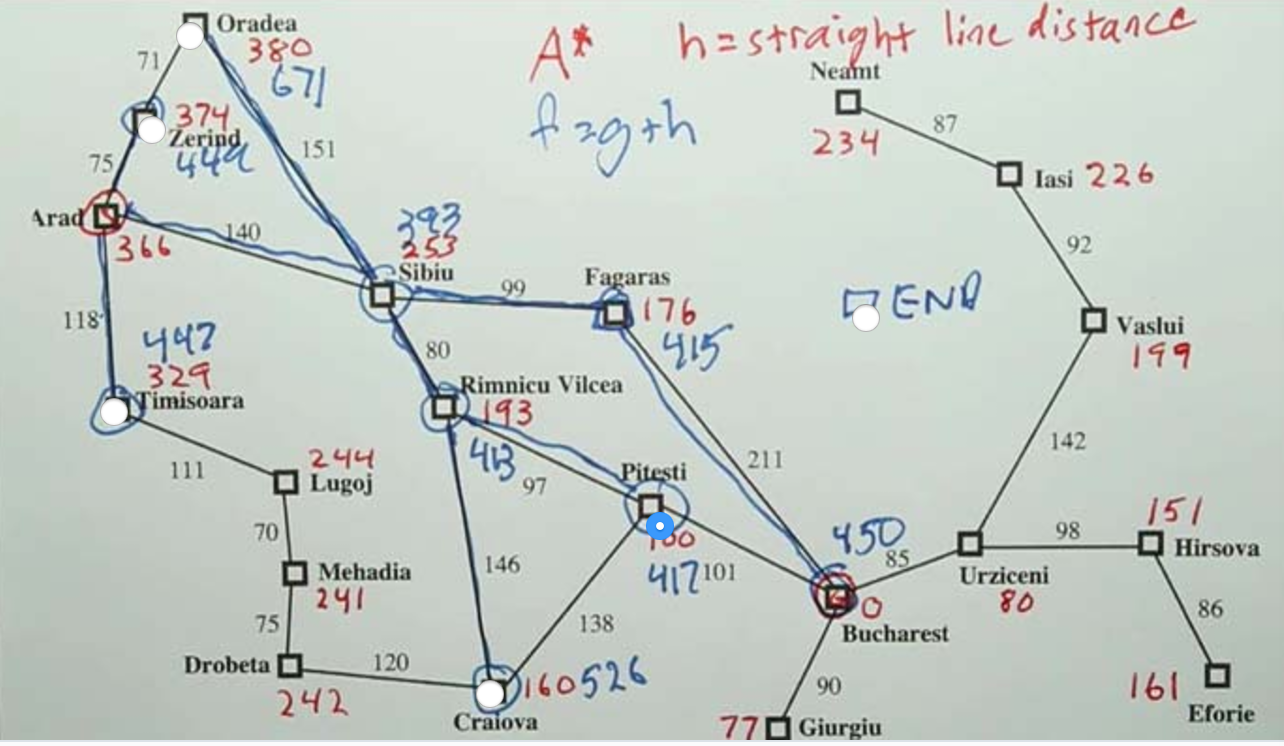


Admissible Heuristic Function¶
Heuristic function is admissible if h(s) <= true cost, rather than necessarily being strictly smaller than the true cost.
- h should never overestimate the distance to the goal.
- h should be optimistic
- h is admissible.
Optimistic Heuristic¶

State Spaces¶


- Robot can be A or B = 2
World itself
- State A can be dirty or not = 2
- State B can be dirty or not = 2
Total = 2 x 2 x 2 = 8 state spaces.


Sliding Blocks Puzzle¶


Problems With Search¶
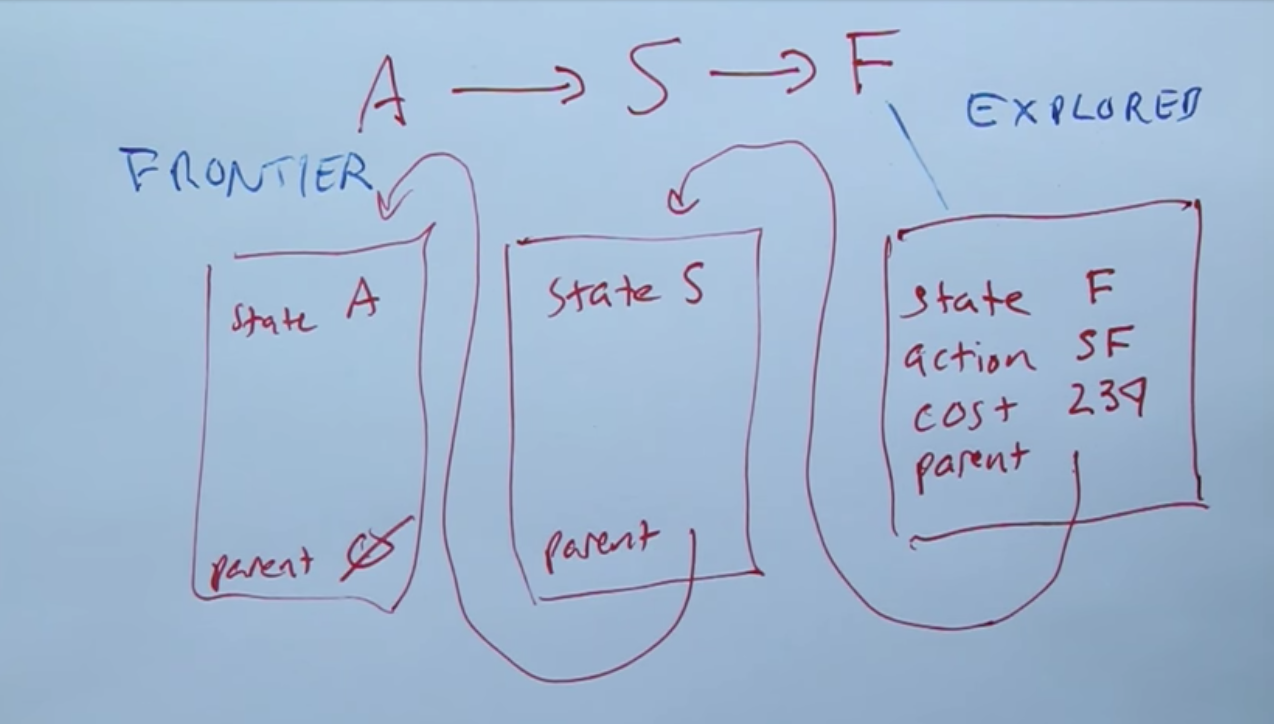
A Note On Implementation¶
References¶
- Korf, 1997, Finding Optimal Solutions to Rubik’s Cube Using Pattern Databases.
- Goldberg, 2011. Reach for A* An Efficient Point-to-Point Shortest Path Algorithm
- Goldberg & Harrelson, March 2003. Computing the Shortest Path A* Search Meets Graph Theory.
- Gutman, 2004. Reach-based Routing A New Approach to Shortest Path Algorithms Optimized for Road Networks.